Josyula Krishna
About Me
As a Robotics Engineer with over 7 years of experience, my career has been driven by a passion for developing innovative autonomous systems and computer vision applications. My expertise spans from advanced navigation algorithms for autonomous vehicles to pioneering vision-based systems in agricultural robotics. I've engineered collision avoidance solutions for drone fleets and warehouse robots, achieving up to 99.9% accuracy, and led projects that increased industrial automation efficiency by 80%. My journey, marked by impactful roles at Virginia Tech Transportation Institute, Oregon State University, and IIIT Hyderabad, showcases my ability to bridge cutting-edge research with practical implementation. I've contributed to projects for industry leaders like Collins Aerospace, Intel, and Fujitsu, pushing the boundaries of what's possible in robotics and AI. I'm committed to advancing the field of robotics, leveraging my diverse skill set in C++, ROS, and machine learning to solve complex real-world problems. With each project, I aim to create solutions that not only meet current needs but also pave the way for future innovations in autonomous systems and robotics technology.Experience
Robotics Engineer
Virginia Tech Transportation Institute
June 2023 - Present
Spearheading autonomous truck navigation projects, including development of a CARLA-based simulation environment integrated with ROS, LiDAR-based 3D object detection achieving 98% accuracy, and implementation of advanced driver assistance systems. Engineered real-time path planning for reverse parking, collision avoidance and control in GPS denied areas, and CAN communication for precise vehicle control.
Graduate Research Assistant
Oregon State University
December 2021 - June 2023
Pioneered innovative computer vision and robotics solutions for agriculture, including 3D volumetric reconstruction of cherry trees with 98% accuracy, synthetic data generation for robotic pruning, and development of a vision-based pruning system achieving 99% detection accuracy and 68% cut accuracy in real-world deployment.
Research Intern
Fujitsu Research
June 2022 - September 2022
Conducted cutting-edge research on Reinforcement Learning for Combinatorial Optimization, focusing on Min k-cut and Maxcut problems using Graph Neural Networks and Pointer Networks.
Technical Lead
Hi-Tech Robotic Systemz
November 2020 - September 2021
Led the design and implementation of autonomous forklift systems and fleet management solutions, increasing machine productivity by 80%. Developed innovative obstacle avoidance systems for a fleet of 63 robots, enhancing operational efficiency in warehouse environments.
Research Assistant
Robotics Research Center, IIIT Hyderabad
June 2016 - November 2020
Conducted extensive research on motion planning and navigation for autonomous vehicles, developing collision avoidance algorithms for drone fleets with 99.9% accuracy. Contributed to projects for Collins Aerospace and Intel India, focusing on urban driving under uncertainty and sensor fusion SLAM.
Publications
Probabilistic Collision Avoidance For Multiple Robots: A Closed Form PDF Approach
Presented at Intelligent Vehicles Symposium 2021
Intent based collision avoidance for autonomous vehicles with collision avoidance guarantees for a specied confidence interval. Applicable for unstructured environments and various on road scenarios.
Projects
{kind=link}
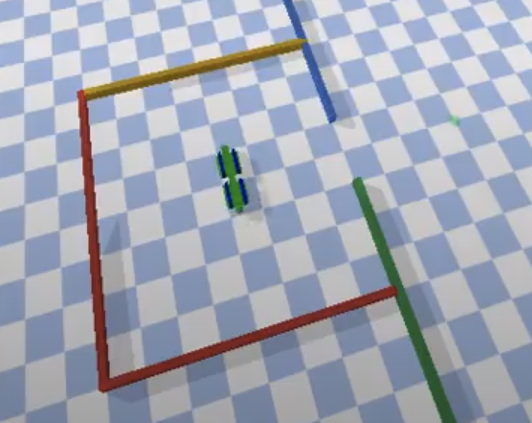
Multirobot Payload Transport
Demonstrated multirobot payload transport with centralized and decentralized reinforcement learning approaches to transport a rigid object
Designed the simulation environment in PyBullet and to work with gym enviroments and experimented with MADDPG, PPO, MAPPO and Neurocoevolutionary methods for multirobot payload transport
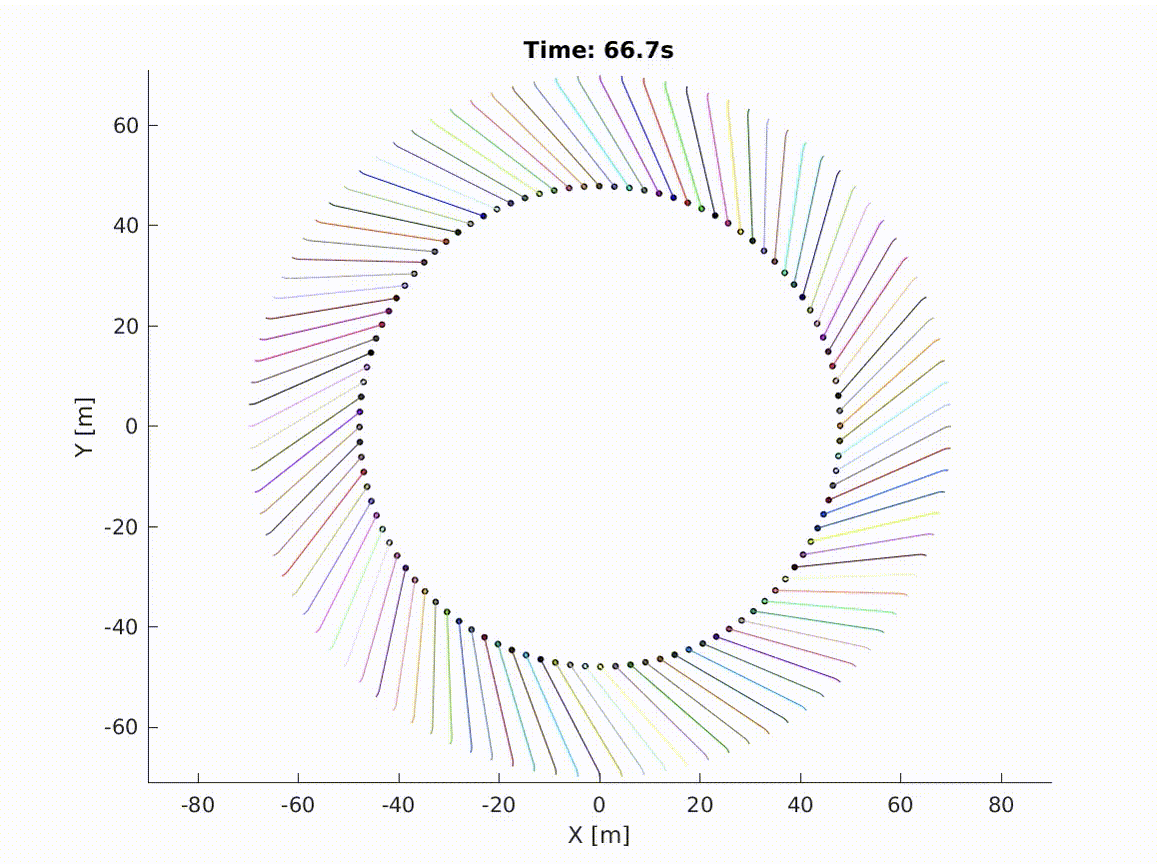
MultiAgent Collision Avoidance With Scaling On Complex Trajectories
Non-holonomic collision avoidance for multiple agents with scaling on complex trajectories
Collision avoidance for autonomous robots in complex ustructured trajectories with non-linear time scaling on collision cone enabling collision avoidance
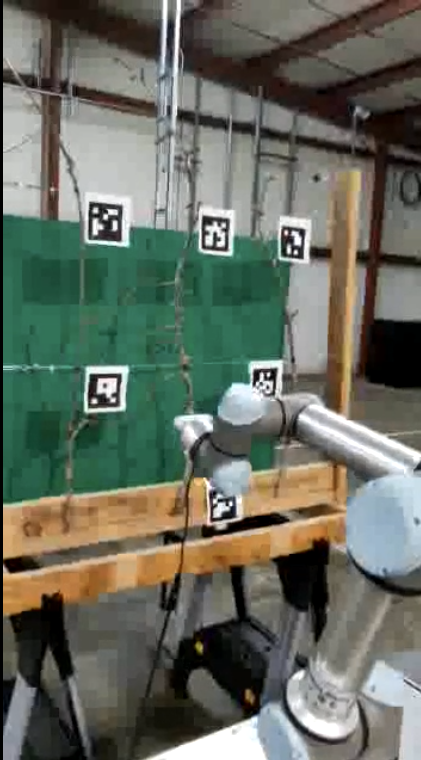
Precision Orchard Management Mapping a Orchard
Created a 3D map of an orchard using a UR5 robotic arm with a Intel Realsense depth camera
A branch segementation and mapping project with RTAB mapping and Hollistic Nested Edge Detection
Responsibility Sensitive & Safety For Autonomous Vehicles
Re-formulated RSS constraints under estimation uncertainty, demonstrated collision avoidance under uncertainty, project for Intel India
Exhaustive analysis of RSS constraints under uncertainty and demonstrated collision avoidance under uncertainty with RSS constraints for autonomous vehicles

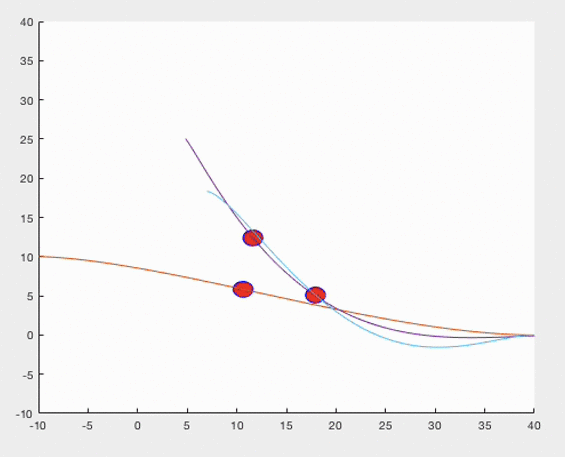
Frenet-Frame Planning for Autonomous Vehicles in CARLA Simulator
Frenet-Frame based planning with lane-change, merging and intersection management
Implemented Frenet-Frame based planning for autonomous vehicles in CARLA simulator with lane-change, merging and intersection management with PID controllers